
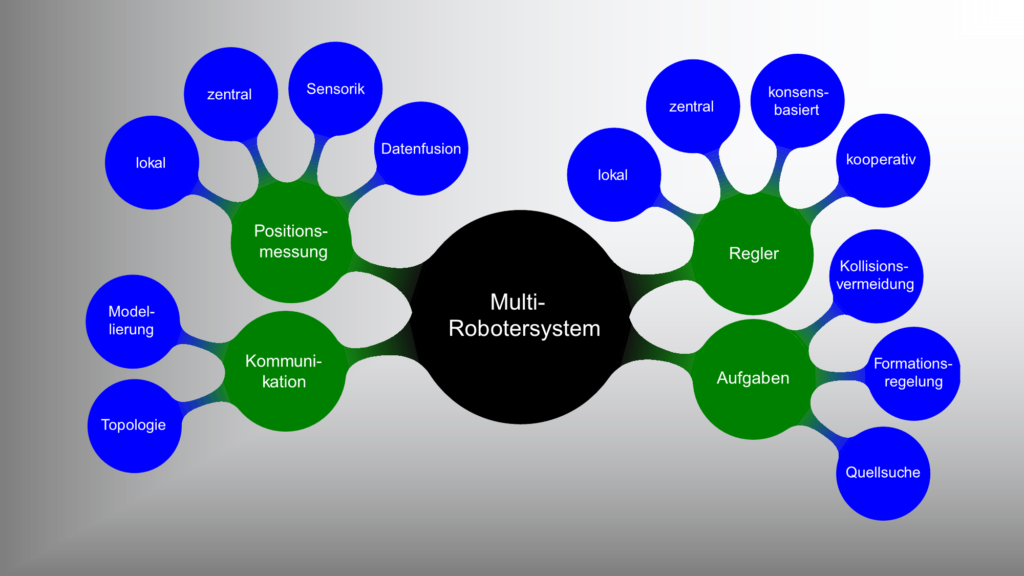
Roboter werden für eine Vielzahl von Aufgaben genutzt, die für Menschen zu aufwendig, gefährlich oder ermüdend sind. Es gibt dabei verschiedene zu untersuchende Aspekte von Multi-Robotersystemen, welche von wissenschaftlichem Interesse sind. Dieses Projekt beschäftigt sich mit der dynamischen Stabilität und Leistungsfähigkeit verschiedener Architekturen von homogenen Multi-Robotersystemen. Die zu berücksichtigen Faktoren sind dabei unter anderem die Kommunikationstopologie, Messeinrichtungen, Quellfindung Regel- und Navigationsalgorithmen. Quellfindung bezeichnet dabei die suche nach einem Extremum einer skalaren Größe, die im Raum verteilt ist.
Der Einsatz von Multi-Roboter Systemen mit solcher Komplexität hat potentielle Einsatzmöglichkeiten in Logistik, humanitären Missionen und Wartungsaufgaben. Für die Untersuchung dieser Systeme ist die Modellierung aller relevanten Teile und Simulationen notwendig. Die Ergebnisse werden dann auf omnidirektional beweglichen Robotern mit LiDAR (light detection and ranging) Sensoren und kartenbasierter Navigation verifiziert.
Das Projekt ist durch Mitarbeiter der Professur motiviert und wird durch keine externen Forschungsgelder unterstützt. Wenn Du Teil dieses spannenden Entwicklungsprozesses werden oder mehr zu diesem Thema erfahren möchtest, wende Dich gern an Marcus Dorau
Letzte Änderung: 14. April 2022