
Übersicht
- Analytische Berechnung von Ausgleichsvorgängen in Asynchronmotoren
- Analytische Modellierung von gekoppelten mechatronischen Systemen
- Entwicklung eines Verfahrens zur Vorausberechnung des magnetischen Geräuschs von Asynchronmaschinen
- Methode zum anforderungsgerechten Design mechatronischer Systeme
- Auslegung von Linearantrieben
Kleinmaschinen
Analytische Berechnung von Ausgleichsvorgängen in Asynchronmotoren
Aufgrund gestiegener Genauigkeitsforderungen bei der Bestimmung der mechanischen Festigkeit wurde für die Auslegung von Asynchronmaschinen ein neues Verfahren zur Berechnung der dynamischen Luftspaltmomente erarbeitet. Die Luftspaltmomente sind maßgebliche Eingangsgröße für die mechanischen Festigkeitsberechnungen. Besonderer Fokus bei der Entwicklung des Verfahrens liegt auf der exakten Darstellung der Zeitfunktion des Luftspaltmoments bei den transienten Ausgleichsvorgängen des zwei- und dreipoligen Klemmenkurzschlusses, der Netzumschaltung und des Anlaufs. Das entwickelte Modell umfasst die nichtlinearen Eigenschaften der Stromverdrängung und der Eisensättigung. Ein angemessener Zeitaufwand bei der Bestimmung der benötigten Parameter und der anschließenden Berechnung ist gewährleistet.
Die berechneten Zeitverläufe der Ströme und Momente für die transienten Vorgänge werden für einen Verifikationsabgleich mit den Berechnungsergebnissen aus Finite-Elemente Simulationen gegenübergestellt. Ein weiterer wesentlicher Arbeitsschritt zu Gewährleistung der Modellgenauigkeit besteht in dem Abgleich der Ergebnisse der FE-Berechnung mit Messungen an realen Maschinen auf einem Prüfstand.
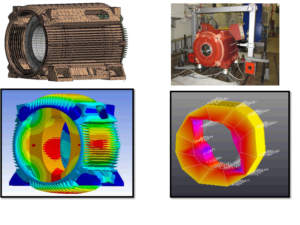
Entwicklung eines Verfahrens zur Vorausberechnung des magnetischen Geräuschs von Asynchronmaschinen
Asynchronmaschinen gehören zu den derzeit am häufigsten verwendeten Maschinen. Diese werden beispielsweise in der Industrie als Pumpen, Antriebe, Lüfter und Kompressoren eingesetzt. Mit dem Fortschritt der Umrichtertechnik in den vergangenen Jahren hat sich die Regelbarkeit, vor allem im Hinblick auf die Drehzahlregelung, deutlich verbessert. Allerdings werden hierdurch weitere Anteile an Oberwellen in die Systeme eingeprägt.
Die Oberwellen können Eigenfrequenzen des Blechpaketes treffen, so dass hieraus Blechpaketschwingungen entstehen, die ein hohes Betriebsgeräusch zur Folge haben. Auch in dieser Hinsicht unterliegen die industriellen Maschinen strengen, immer weiter wachsenden Anforderungen. Daher ist eine Berechnung dieser Oberwellen von großer Bedeutung, um bereits beim Entwurf der Maschine hierauf eingehen zu können.
Im Rahmen des Forschungsprojektes wurde Verfahren zur Vorausberechnung des magnetischen Geräuschs von Asynchronmaschinen entwickelt wurde. Hierzu wird ein zweidimensionales Finite Elemente Modell einer ausgewählten Asynchronmaschine mit dem Softwarepaket Flux2D und Maxwell erstellt. Mit Hilfe dieser Modells sollen die Radialkraftwellen im Luftspalt berechnet werden. Diese stellen die anregenden Kräfte für Blechpaketschwingungen dar. Diese Radialkraftwellen werden auf ein dreidimensionales mechanisches Modell in ANSYS aufgeprägt. Anschließend wird auf Basis dieser Verformungen die Geräuschentwicklung berechnet.
Zum Abschluss werden die berechneten Ergebnisse anhand von Messungen abgeglichen. Hierzu gehört zum Einen eine experimentelle Modalanalyse, zum Anderen die Messung der Geräuschentwicklung des Beispielmotors.
Auslegung von Linearantrieben
Bei der Auslegung von Linearantrieben, muss auf einige Unterschiede zu den rotierenden Gegenstücken, besonders bei dem Asynchronkurzstator, geachtet werden. Besonders der negative Einfluss des geschwindigkeitsabhängigen Längsrandeffektes muss in den Modellen berücksichtigt werden, welcher in gängiger Literatur nur in stationären Modellen berücksichtigt wird. Um ein komplettes dynamisches Modell des Kurzstatorlinearmotors zu erhalten wird ein Kettenleitermodell entwickelt, was dazu dient die Induktivitätsmatrix des kompletten dynamischen Modells nach jedem Zeitschritt des Lösungssolvers neu aufzustellen. Durch spätere Erweiterungen des Kettenleiters sollen noch weitere Einflüsse auf das dynamische Verhalten des Linearantriebs berücksichtigt werden.
Letzte Änderung: 4. November 2019