
Unterstützungssysteme werden auf unterschiedliche Weise aktuiert. Neben der Aktuierung basierend auf elektrischen Antrieben aus der klassischen Robotik werden biegeflexible pneumatische Aktuatoren genutzt. Dem Vorteil der Flexibilität stehen hier erhebliche Nachteile hinsichtlich des Systemgewichts und -aufbaus gegenüber. Der bereits entwickelte biegeflexible Linearaktuator bietet hier das Potential, das geringe Systemwicht der Antriebe aus der klassischen Robotik mit der Flexibilität der pneumatischen Antriebe zu verbinden.
Aufbauend auf dem biegeflexiblen Linearaktuator wird im Projekt KIKU (KI basierten, physischen (Körper-)Unterstützungssystemen mit moderner Antriebstechnologie) eine Methodik zur Auslegung elektrischer Antriebssysteme für Unterstützungssysteme aufgebaut. Dies geschieht basierend auf einem digitalen Zwilling, also einem numerischen Modell der letztlichen Anwendung. Aufgrund ihrer abstrakten Formulierung erlaubt die Methodik, auch unterschiedliche am Markt verfügbaren elektrischen Antriebssysteme hinsichtlich ihrer Eignung in Unterstützungssystemen zu beurteilen.
Neben der Auslegung und Integration elektrischer Antriebe ist die Erforschung der Fertigungsmöglichkeiten für individuelle Aktuatorik ein zentrales Thema in dem Projekt.
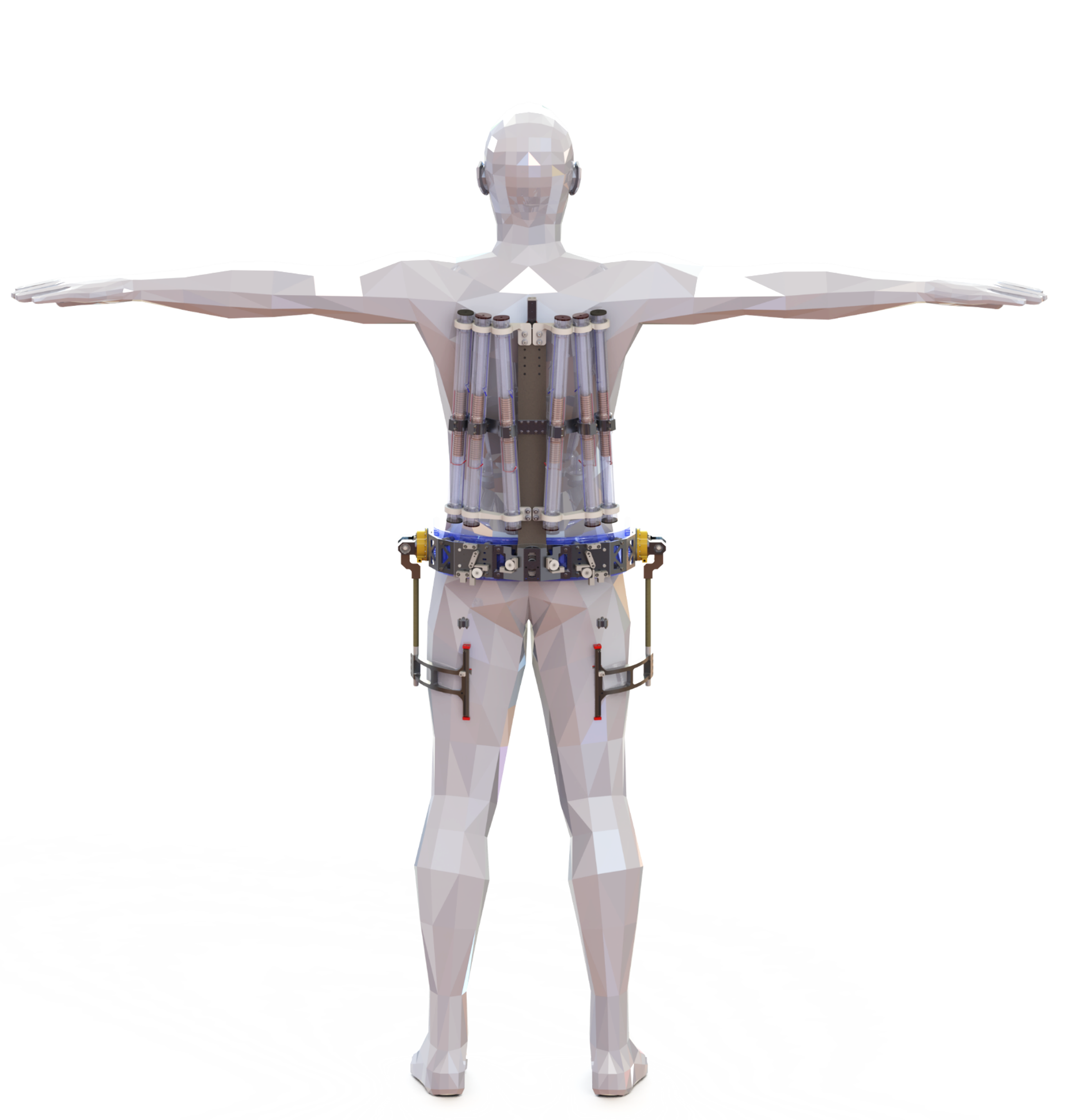
Ein Ergebnis des Projekts, ein Exoskelett mit einem optimierten Antriebssystem auf Basis des biegeflexiblen Linearaktuators ist in untenstehender Abbildung dargestellt.
Das Projekt wird vom dtec.bw – Zentrum für Digitalisierungs- und Technologieforschung der Bundeswehr finanziert. Dtec.bw wird finanziert von von der Europäischen Union – NextGenerationEU.


Offene Seminararbeiten / Abschlussarbeiten
Themenvorschläge für Arbeiten im Rahmen der Forschung an elektrischen Antrieben für Exoskelette finden Sie hier.
Letzte Änderung: 28. Februar 2025