
Im Forschungsprojekt „Flexibler Linearaktuator“ wird ein innovativer Aktuator für den Einsatz in der Soft Robotik entwickelt. Der Aktuator wird als tubularer permanentmagneterregter Linearmotor aufgebaut. Die Entwicklung zielt darauf ab, ein möglichst leichtes und biegsames System zu generieren, mit dem völlig neue Gestaltungsmöglichkeiten in Unterstützungssytemen wie weichen, körpernah agierenden Exoskeletten erschlossen werden können.
Zentrale Aspekte:
- Methodenentwicklung
- Analytische und numerische multiphysikalische Berechnung elektrischer Linearantriebe
- Aufbau und Inbetriebnahme eines Laborprüfstandes für die Vermessung des Aktuators
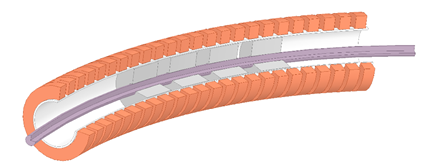
Ringmagneten (Grau), Gleitschicht (Weiß) und Spulen (Orange)


Kreischer, C., Dreishing, F.:
Abschlussbericht zum ZIM‐Projekt „Intellus ‐ Polymer / Polymeraktuator ‐ Elektromagnetische Simulation ‐ Entwicklung eines Prüfstandes und Durchführung von Testreihen“
Bericht, Helmut-Schmidt-Universität / Universität der Bundeswehr, Januar 2022
Letzte Änderung: 20. Februar 2024