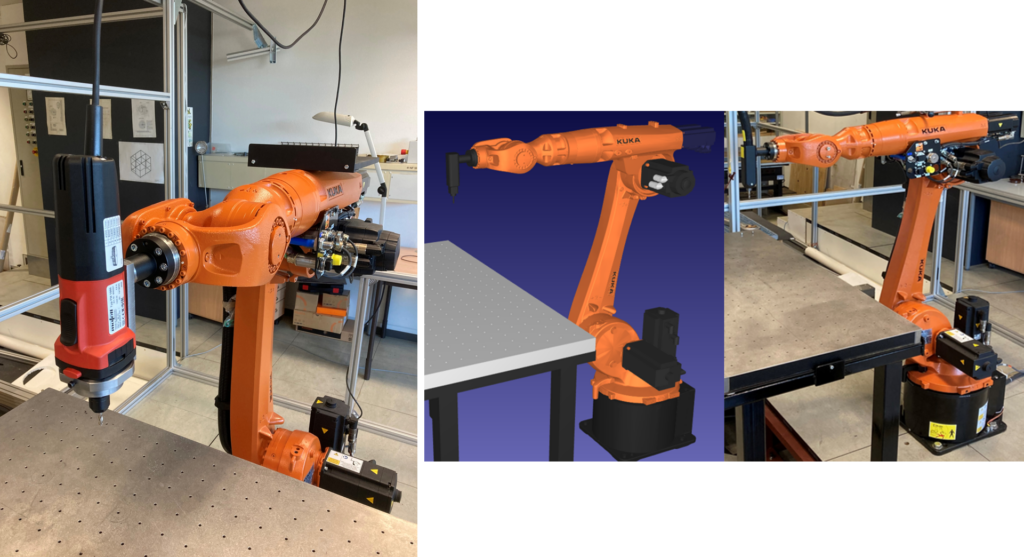
Im Robotik-Labor ist ein Standard 6-Achs-Knickarm-Roboter vorhanden. Dadurch kann ein breites Spektrum an Fragestellungen aus der Industrie untersucht werden. Dieses reicht von einfachen Handhabungsaufgaben, wie sie vielfach in der Industrie vorkommen, bis hin zu komplexeren Bewegungen. Zudem kann mit dem Roboter spanende Fertigungsverfahren wie z.B. Fräsen oder Bohren angewendet werden. Simulationsmodelle helfen, den Prozess zu modellieren, zu optimieren und letztlich in der Realität anzuwenden.
Darüber hinaus wird in Kooperation mit dem Institut für Werkstofftechnik am robotergeführten Kaltgasspritzen geforscht.

Aktuelle Forschungsprojekte unserer Professur im Bereich der Robotik sind:
- Labor für intelligente Leichtbauproduktion (LaiLa)
- Computergesteuerte Bauteilaufarbeitung (COmputer-based REfurbishment, CORE)
- Intelligente modulare Robotik und integrierte Produktionsgestaltung im Flugzeugbau (iMOD)
- Rechtskonforme IT-Konzepte und -Lösungen für Verbünde autonomer Land-, Wasser- und Luftfahrzeuge (RIVA)
Eine Übersicht über all unsere Forschungsprojekte befindet sich hier: https://www.hsu-hh.de/aut/forschung/forschungsthemen
Letzte Änderung: 4. März 2025