Im Bereich der mobilen Robotik stehen verschiedene autonome Systeme für Forschung und Entwicklung zur Verfügung. Dazu gehören:
- ConVecDro (2x) und Auriol (2x) – Multirotor-Drohnen für präzise autonome Flüge und flexible Nutzlastintegration.
- Capra Hircus (2x) – Geländefähige Rover für den autonomen Transport und Missionen in anspruchsvollen Umgebungen.
- CarryAir (1x) – Ein hybrides VTOL-UAV für Langstreckeneinsätze mit automatisiertem Start und Landung.
- Autonomes Boot „Venatus“ (1x) – Vollintegriertes Boot zum Transport von Rover und Drohne.
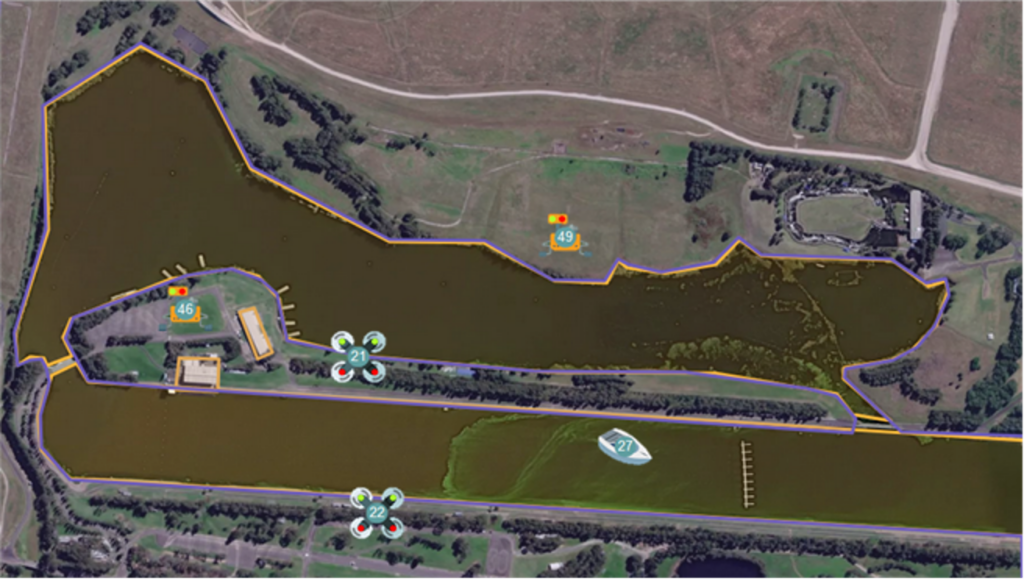
- Generic Control Center – Ein webbasiertes Leitstandsystem zur Steuerung und Überwachung mehrerer autonomer Fahrzeuge. Es können diverse abstrakte Missionen definiert werden, die durch den autonomen Roboterverbund ausgeführt werden.
- GAZEBO Simulationsumgebung – Eine Plattform zur Entwicklung und Erprobung autonomer Verhaltensweisen direkt auf fahrzeugnaher Hardware für eine direkte Übertragbarkeit.
Diese Systeme ermöglichen praxisnahe Tests und Simulationen für Anwendungen in Logistik, Inspektion und weiteren autonomen Missionen.
-

- Multirotor-Drohne „ConVecDro“

-

- Multirotor-Drohne „Auriol“

-

- Rover „Caprs Hircus“

-

- VTOL „CarryAir“

-

- Autonomes Boot „Venatus“


Letzte Änderung: 3. März 2025